

ScoutDI, in samenwerking met LRQA en Allnex, demonstreerde de inspectie van een stikstof opslagvat op het terrein van Allnex in Bergen-op-Zoom, Nederland.
Het uitgangspunt was om het drone-systeem te testen voor het inspecteren van een besloten ruimte zonder menselijke toegang. Deze inspectie was onderdeel van het programma dat LRQA samen met SafetyTechAccelator opzette. Een programma waarin onderzocht wordt hoe nieuwe technologie, zoals robotica, veiligheidsrisico’s kan verminderen in verschillende branches.
Voorbereiding
De inspectie betrof een drukvat voor de opslag van stikstof.

Een horizontale cilinder van 10 meter lang en 3 meter in diameter. Hoewel het vat leeg was op het moment van de inspectie, vormden de geometrie en de afmetingen een interessante uitdaging. Natuurlijk mochten er ook geen personen het vat fysiek betreden. De opzet van de inspectie verliep als volgt:
- De inspectie-assistent beklom de steiger naar de bovenkant van de tank en nam de drone mee.
- De operator bleef op de grond en communiceerde met de inspecteur via persoonlijke radio's die communicatie handsfree mogelijk maakten.
Wat kan de drone?
De drone die gebruikt werd betreft een Scout 137, die uitgerust is met een 32-beam scanning Lidar. Het gebruikt de outputgegevens voor mapping, lokalisatie, obstakeldetectie en als visuele begeleiding van de drone-operator.
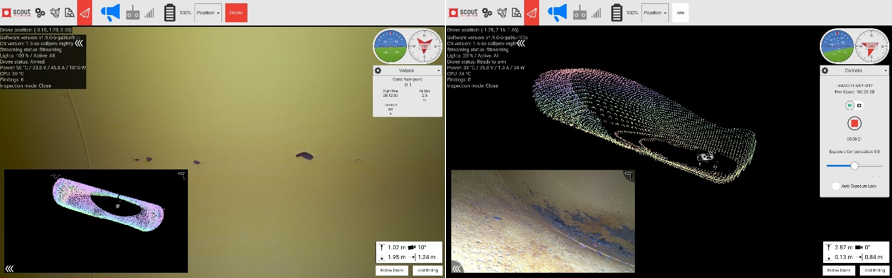
De tablet van de operator toont een 3D point cloud samen met de live camera feed (zie afbeelding). Deze 3D point cloud geeft een kaart weer van het inspectiedoel met de drone gelokaliseerd in het midden. De operator kan deze kaart roteren en zoomen om een overzicht van de binnenzijde te krijgen en de positie en oriëntatie van de drone in het vat te zien. De operator krijgt zo een goed overzicht van de situatie binnenin en kan beslissingen nemen over waar de drone naar toe moet en hoe.
Zonder dit systeem zou de operator alleen op camerabeelden vliegen en niet weten wat zich achter of naast de drone bevindt, noch wat de afstand is tot het dichtstbijzijnde obstakel. Dit systeem maakt zelfs navigeren in een symmetrische tank met homogene oppervlakken mogelijk.
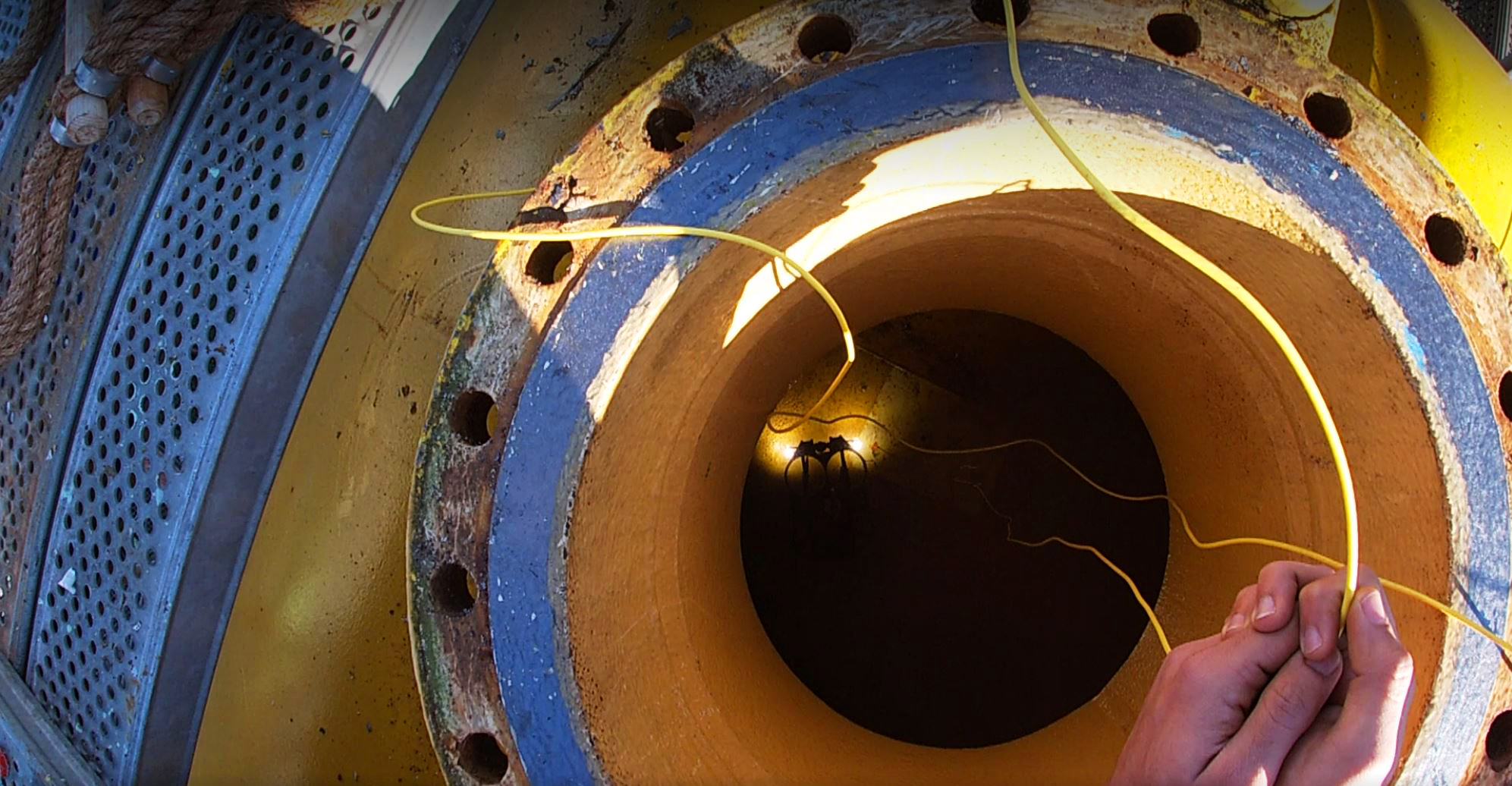
Vangen en vrijlaten
Het mangat waar de drone doorheen moest was kleiner dan de lengte van de drone zelf. De drone werd daarom handmatig in de tank geplaatst, waarna de propellers gestart werden. Aan het einde van de inspectie vloog de operator de drone in de richting van het mangat, vertrouwend op de 3D-kaart die op de tablet te zien is.
Live deelname op afstand
Belanghebbenden buiten de locatie kunnen de inspectie op afstand volgen na het krijgen van toegang tot het Scout Portaal door middel van een hyperlink. Eenmaal in het Scout Portal is de live video feed te zien en kan men interactief met de Lidar 3D point cloud werken; dezelfde informatie die wordt weergegeven op de tablet van de operator.
In samenwerking met SafetyTechAccelator blijven we onderzoeken hoe nieuwe technologie, zoals robotica, veiligheidsrisico’s kan verminderen.
Met dank aan ScoutDI, die de technologie voor de inspectie verzorgde. En Allnex voor het ter beschikking stellen van een opslagvat.


